Hier finden sich einige Live-Mitschnitte des Zoom H5 / Zoom H6 Remote-Protokolls zwischen der Kabelfernbedienung und dem Recorder.
Die Beschreibung des Zoom H6 Protokolls erfolgt weiter unten.
Zoom H5 Remote Protokoll
Vielleicht möchte jemand den Zoom H5 nutzen, um diesen zu einer (DSLR) Kamera zu synchronisieren. Dabei bietet sich das Starten und Stoppen mittels des Remote-Anschlusses am Recorder an. Die Daten werden mit 2400 Baud, Startbit, 8 Datenbits, keine Parität, 1 Stoppbit seriell im Voll-Duplex übertragen. Die Versorgungsspannung und die Datenpegel liegen bei 3.3V.
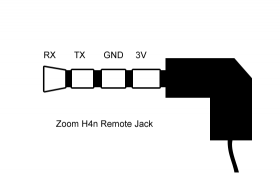 Die Pinbelegung des Fernbedienungssteckers ist im Bild zu sehen, welches ich mir hier geliehen habe: http://www.apm-motionpictures.de/de/h4ncontrol
Die Pinbelegung des Fernbedienungssteckers ist im Bild zu sehen, welches ich mir hier geliehen habe: http://www.apm-motionpictures.de/de/h4ncontrol
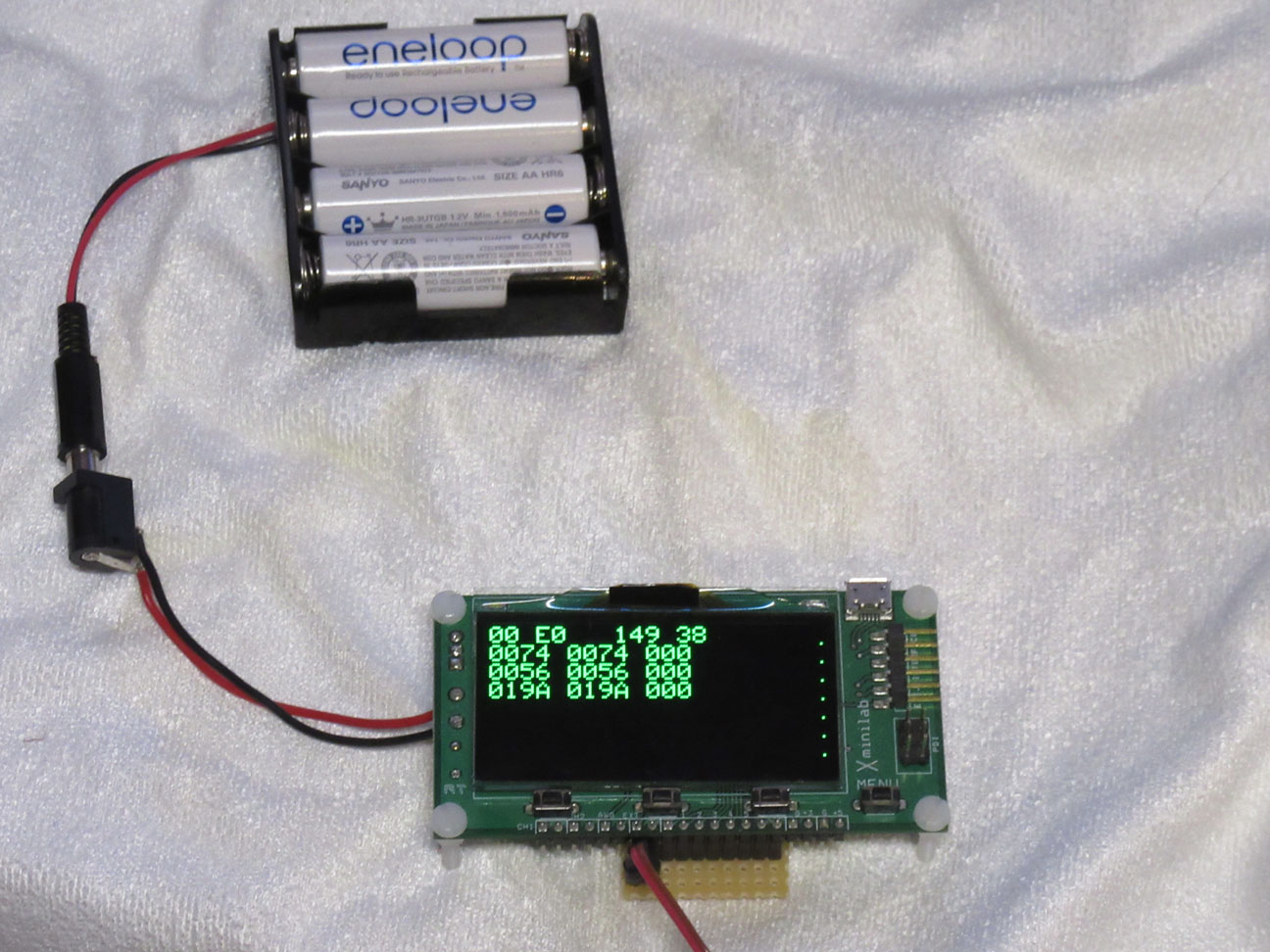
Die Mitschnitte wurden mit einem Logic-Analyzer erstellt. Alle Bilder lassen sich vergrößern, wenn man sie anklickt. Die beiden oberen Zeilen geben die Datentelegramme der Fernbedienung wieder, die beiden unteren Zeilen die Datentelegramme des Recorders (als Bitstrom und dekodiert). Der Recorder sendet viele der LED-Kommandos mehrfach, immer wenn sich an den LED-Zuständen im Recorder etwas ändert. Die Auswertung in der Eigenbaulösung muss daher jeden empfangenen Befehl verarbeiten. Es werden immer dann LED-Kommandos zur Fernbedienung gesendet, wenn entweder am Recorder eine Taste gedrückt wird, die den Zustand der LED(s) verändert, oder wenn eine solche Taste an der Fernbedienung gedrückt wird. Von der Fernbedienung muss jeder Befehl nur ein einziges Mal gesendet werden. Der Recorder verschickt stets 3-Byte-Befehle, das erste Byte hat immer Bit 7 und Bit 3 gesetzt. Die Fernbedienung verschickt stets 2-Byte-Befehle, das erste Byte hat immer Bit 7 gesetzt. Eine gedrückte Taste überträgt einen bestimmten Wert größer/gleich 0x80, 0x01. Eine losgelassene Taste überträgt immer den Wert 0x80, 0x00.
Die Fernbedienung funktioniert erst nach einer erfolgreichen Anmeldung am Recorder. Diese Anmeldung ist hier zu sehen:
Nachfolgend werden alle Datentelegramme gezeigt, die beim Drücken einer Taste auf der Fernbedienung von dieser gesendet werden, gegebenenfalls mit einer Antwort durch den Recorder, falls LEDs verändert werden.
Taste Volume +: Taste Volume -:
Taste Volume -: Taste L einschalten:
Taste L einschalten: Taste L ausschalten:
Taste L ausschalten: Taste R einschalten:
Taste R einschalten: Taste R ausschalten:
Taste R ausschalten: Taste 1 einschalten:
Taste 1 einschalten: Taste 1 ausschalten:
Taste 1 ausschalten: Taste 2 einschalten:
Taste 2 einschalten: Taste 2 ausschalten:
Taste 2 ausschalten: Wiedergabe Kanäle L/R starten:
Wiedergabe Kanäle L/R starten: Pause:
Pause: Stop Kanäle L/R:
Stop Kanäle L/R: Schneller Vorlauf:
Schneller Vorlauf: Schneller Rücklauf:
Schneller Rücklauf: Aufnahmestart:
Aufnahmestart: Aufnahmestopp:
Aufnahmestopp:
Nachfolgend werden alle Datentelegramme beim Drücken einer Taste auf dem Recorder gezeigt, die eine Veränderung der LEDs bewirken.
Taste L einschalten: Taste L ausschalten:
Taste L ausschalten: Taste R einschalten:
Taste R einschalten: Taste R ausschalten:
Taste R ausschalten: Wiedergabe Kanäle L/R starten:
Wiedergabe Kanäle L/R starten: Wiedergabe Kanäle L/R stoppen:
Wiedergabe Kanäle L/R stoppen: Wiedergabe Kanal 1 starten:
Wiedergabe Kanal 1 starten: Wiedergabe Kanal 1 stoppen:
Wiedergabe Kanal 1 stoppen: Wiedergabe Kanal 2 starten:
Wiedergabe Kanal 2 starten: Wiedergabe Kanal 2 stoppen:
Wiedergabe Kanal 2 stoppen: Aufnahme Kanäle L/R starten:
Aufnahme Kanäle L/R starten: Aufnahme Kanäle L/R stoppen:
Aufnahme Kanäle L/R stoppen: Aufnahme Kanal 1 starten:
Aufnahme Kanal 1 starten: Aufnahme Kanal 1 stoppen:
Aufnahme Kanal 1 stoppen: Aufnahme Kanal 2 starten:
Aufnahme Kanal 2 starten: Aufnahme Kanal 2 stoppen:
Aufnahme Kanal 2 stoppen:
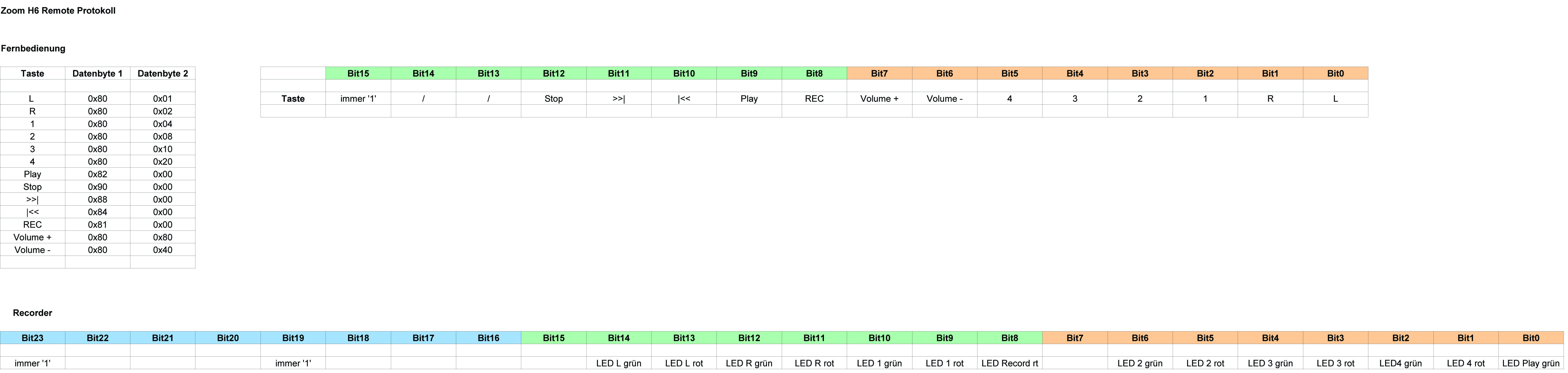
Daraus ergibt sich folgende Zuordnung der Bits innerhalb der Befehlssequenzen:

Zoom H6 Remote Protokoll
Das Protokoll des Zoom H6 ähnelt stark dem des Zoom H5. Unterschiede sind die beiden zusätzlichen Kanäle 3 und 4, sowie eine andere Anmeldesequenz, die so aussieht:
Die Bitzuordnung der einzelnen Befehlssequenzen ist folgendermaßen gestaltet: